
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- 자율탐사
- GUI
- SLAM
- Gazebo
- 인공지능
- Simulation
- turtlebot3
- WSL
- WSL2
- ZED2
- 티스토리챌린지
- 오블완
- 자율주행
- Puck LITE
- DevOps
- U-blox
- ROS2
- RTK
- 강화학습
- turtlesim
- ROS
- Jetson
- C++
- GPS
- 터틀심
- ubuntu
- 로봇
- QT
- Visual SLAM
- 젯슨
- Today
- Total
직관적인느낌
경로 제어 (Stanley method, Model Predict Control) 본문
Stanley Method는 주로 로봇이나 차량이 경로를 추종할 때 사용되는 제어 알고리즘입니다. 이 알고리즘은 비교적 간단하고 직관적이며, 특히 경로 추종에 있어서 효과적입니다. Stanley Method는 로봇의 현재 상태 정보(위치 및 방향)를 이용하여 제어 입력을 계산합니다. 아래에 Stanley Method의 작동 원리를 설명하고, 모델 기반 제어 방법과 비교해보겠습니다.
Stanley Method의 기본 원리
Stanley Method는 주로 로봇의 앞바퀴를 경로의 특정 지점으로 향하게 하여 경로를 추종합니다.
이를 위해 두 가지 주요 요소를 고려합니다:
1. 경로 추종 오차(가로 방향 오차, 𝑒): 현재 위치와 목표 경로 사이의 수직 거리입니다.
2. 헤딩 오차(현재 로봇의 진행 방향과 경로의 접선 방향 사이의 각도입니다.
Stanley Method의 조향 각도 𝛿는 다음과 같이 계산됩니다:
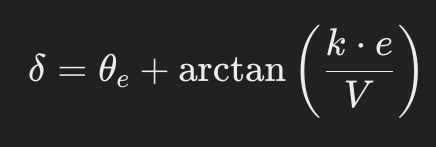
여기서 𝑘는 조향 이득(gain)이며, 𝑉는 현재 속도입니다. 이를 통해 로봇은 경로를 부드럽게 따라갈 수 있습니다.
필요 정보
Stanley Method는 다음 정보를 필요로 합니다:
1. 현재 속도 (𝑉): 로봇의 현재 속도 정보.
2. 경로 추종 오차 (𝑒): 로봇의 현재 위치와 경로 사이의 가로 방향 오차.
3. 헤딩 오차 (𝜃𝑒): 로봇의 현재 진행 방향과 경로의 접선 방향 사이의 각도.
따라서 Stanley Method를 사용하기 위해서는 로봇의 현재 위치와 방향 정보가 필요합니다. 이는 일반적으로 GPS, IMU, 라이다, 또는 비전 시스템을 통해 얻어집니다.
모델 기반 제어와의 비교
모델 기반 제어(Model-Based Control)는 로봇의 동역학 모델을 이용하여 제어 입력을 계산하는 방법입니다. 대표적인 모델 기반 제어 방식으로는 MPC(Model Predictive Control), LQR(Linear Quadratic Regulator) 등이 있습니다. 이 방식들은 로봇의 상태(위치, 속도, 가속도 등)에 대한 정확한 모델을 필요로 하며, 이를 통해 더 정밀한 제어를 가능하게 합니다.
모델 기반 제어의 장점
1. 더 높은 정밀도: 로봇의 동역학 모델을 사용하여 제어 입력을 계산하므로 더 높은 정밀도를 제공합니다.
2. 미래 예측: MPC와 같은 방법은 미래의 여러 시간 스텝을 고려하여 최적의 제어 입력을 계산합니다.
3. 제약 조건 처리: 물리적 한계나 환경 제약을 모델에 포함시켜 제어 입력을 계산할 수 있습니다.
모델 기반 제어의 단점
1.복잡성: 로봇의 동역학 모델을 정확하게 정의하고 식별하는 것이 어렵고 복잡할 수 있습니다.
2.계산 비용: 최적화 문제를 해결하는 데 많은 계산 자원이 필요할 수 있습니다.
추천 방법
Stanley Method는 간단하고 실시간 제어에 적합한 알고리즘입니다. 그러나 고속 주행 시나 복잡한 환경에서는 한계가 있을 수 있습니다. 따라서 다음과 같은 방법들을 추천할 수 있습니다:
1. Stanley Method와 모델 기반 제어의 결합:
낮은 속도나 단순한 환경에서는 Stanley Method를 사용하고, 고속 주행이나 복잡한 환경에서는 모델 기반 제어(MPC, LQR 등)를 사용하는 하이브리드 접근 방식을 고려할 수 있습니다.
2. Adaptive Stanley Method:
로봇의 속도에 따라 𝑘 값을 동적으로 조정하는 적응형 Stanley Method를 사용할 수 있습니다.
3. 경로 추종 성능 향상을 위한 필터링:
상태 추정을 위해 칼만 필터(Kalman Filter)나 확장 칼만 필터(Extended Kalman Filter)를 사용하여 위치 및 속도 정보를 보다 정확하게 추정할 수 있습니다.
Stanley Method를 기본으로 사용하되, 고급 제어 기법을 추가하여 제어 성능을 향상시키는 접근 방식을 추천드립니다. 이를 통해 서빙 로봇의 움직임을 더욱 부드럽고 정밀하게 만들 수 있습니다.

'자율주행' 카테고리의 다른 글
| 자율 탐사 알고리즘의 심층 분석 (0) | 2024.11.21 |
|---|---|
| 자동으로 지형을 그려보자 (0) | 2024.11.20 |
| 모듈 간 통합 및 데이터 흐름 - 도식 (0) | 2024.09.13 |
| ACS 구조 설계 (0) | 2024.09.13 |
| 공장 자동화를 위한 로봇 솔루션 - 개념 및 접근, 개발 (1) | 2024.09.13 |
