

Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- QT
- 오블완
- ubuntu
- 젯슨
- C++
- 터틀심
- GPS
- 인공지능
- U-blox
- turtlesim
- 자율탐사
- ROS
- SLAM
- WSL
- Simulation
- DevOps
- 강화학습
- turtlebot3
- Visual SLAM
- ROS2
- Puck LITE
- 티스토리챌린지
- 로봇
- 자율주행
- Gazebo
- GUI
- RTK
- Jetson
- ZED2
- WSL2
Archives
- Today
- Total
직관적인느낌
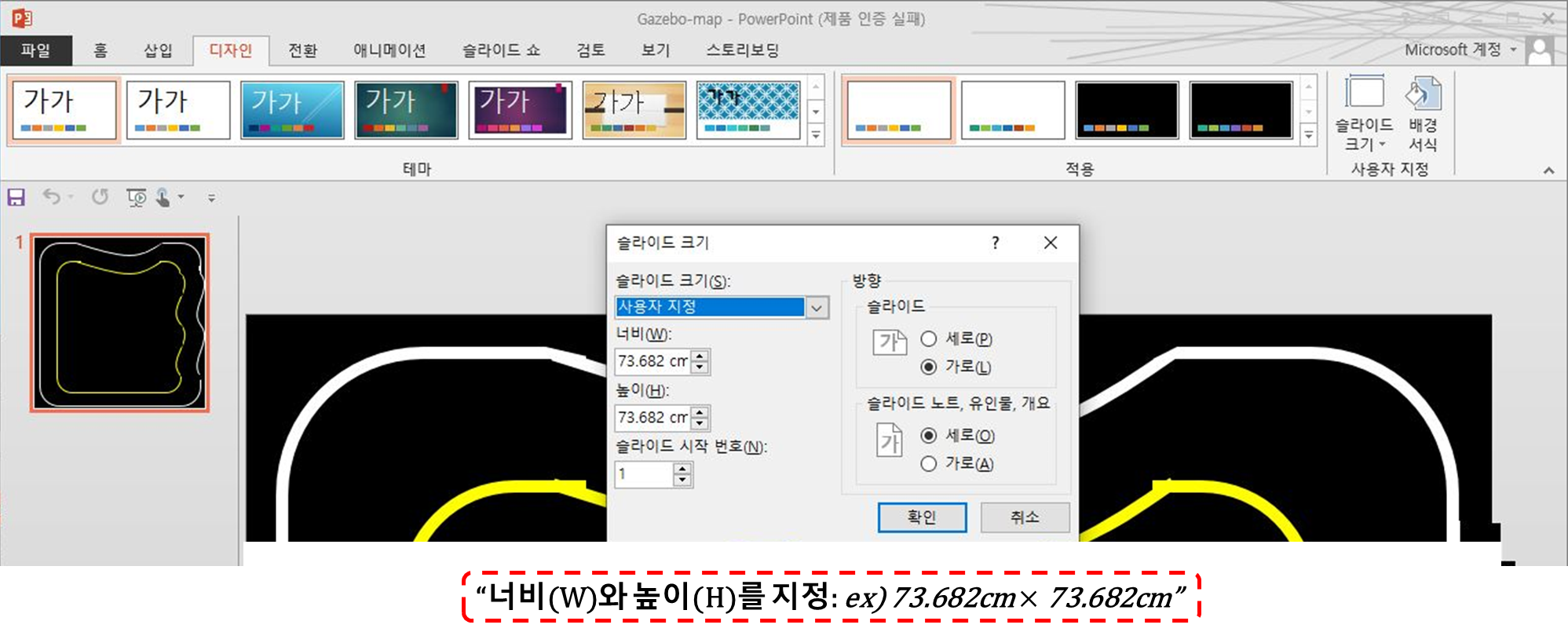
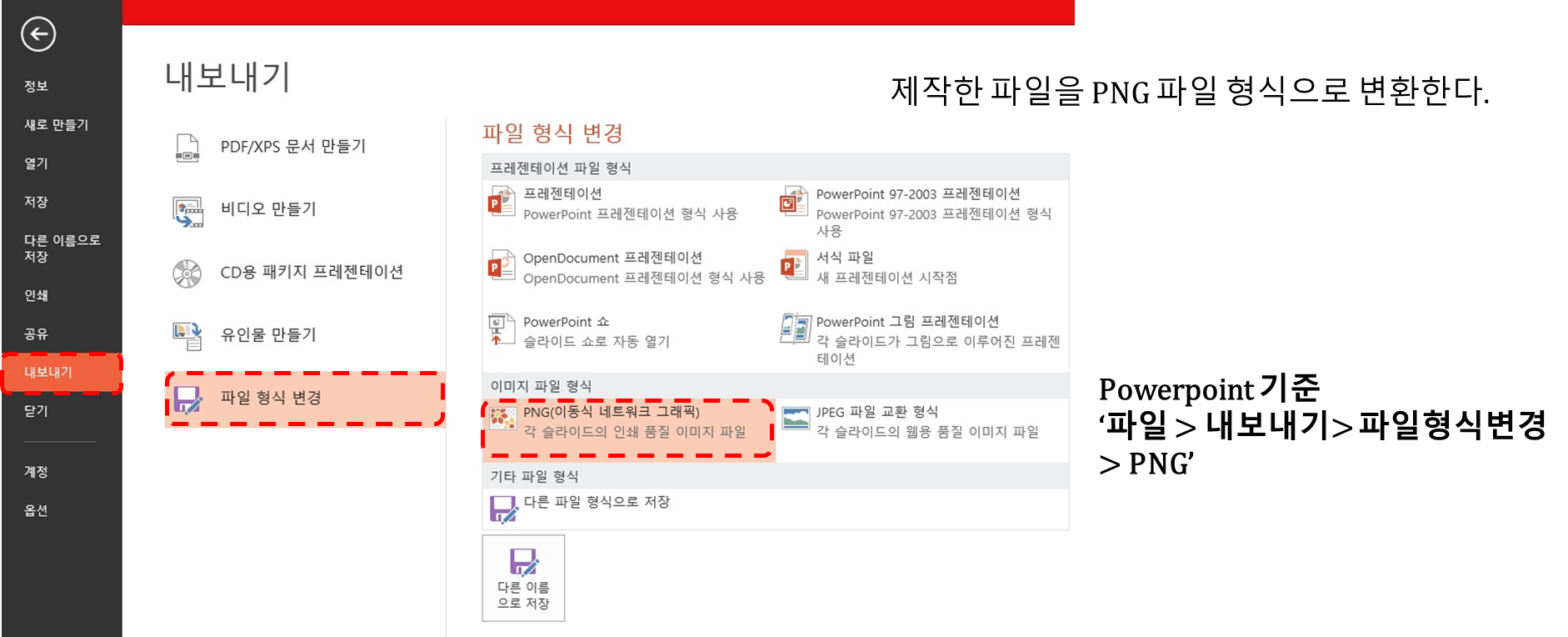
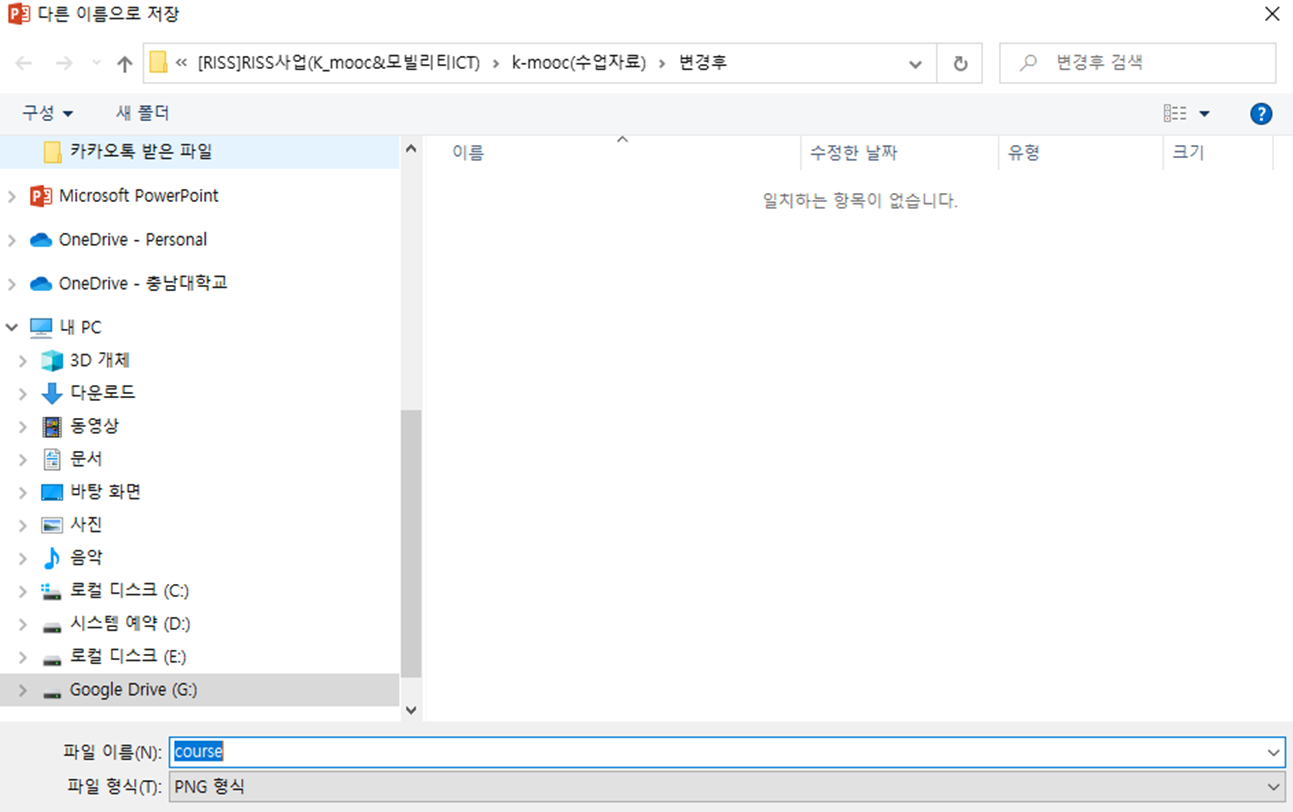
ROS lane detection simulation(+로봇 초기 위치) - map 제작 with 파워 포인트 본문
728x90
반응형






728x90
반응형
'공학 > ROS' 카테고리의 다른 글
| Jetson을 사용할때, SD카드를 쓰면 안되는 이유 (0) | 2023.07.03 |
|---|---|
| ROS - 터틀심을 이용한 ROS기초, Rqt tutorial(Turtlesim) - 정리 (0) | 2023.03.20 |
| Gazebo 상에서 불러오는 로봇의 초기 위치 및 자세 변경 (0) | 2023.03.15 |
| 윈도우에서 ROS 사용하기! (with WSL)_설치 과정 2. (0) | 2023.03.10 |
| 윈도우에서 ROS 사용하기! (with WSL)_설치 과정 1. (0) | 2023.03.10 |
'공학/ROS' Related Articles
more

