
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
Tags
- GUI
- 젯슨
- WSL2
- ROS
- ROS2
- ubuntu
- DevOps
- 티스토리챌린지
- 인공지능
- Gazebo
- 자율탐사
- WSL
- Puck LITE
- 터틀심
- 오블완
- QT
- Simulation
- RTK
- Jetson
- GPS
- ZED2
- 로봇
- turtlesim
- U-blox
- SLAM
- 강화학습
- turtlebot3
- 자율주행
- C++
- Visual SLAM
Archives
- Today
- Total
직관적인느낌
ROS - Gazebo tutorial (Official Tutorial), 튜토리얼 본문
728x90
반응형
- 전체 소스 코드
ROS - Gazebo tutorial (Official Tutorial), 튜토리얼 - Source Code(전체 코드)
Source Code false 0 0 .1 0 0 0 .4 .2 .1 .4 .2 .1 -0.15 0 -0.05 0 0 0 .05 0 0 1.0 1.0 -0.15 0 -0.05 0 0 0 .05 0.1 0.13 0.1 0 1.5707 1.5707 .1 .05 .1 .05 0.1 -0.13 0.1 0 1.5707 1.5707 .1 .05 .1 .05 0 0 -0.03 0 0 0 left_wheel chassis 0 1 0 0 0 0.03 0 0 0 righ
lbj142632.tistory.com
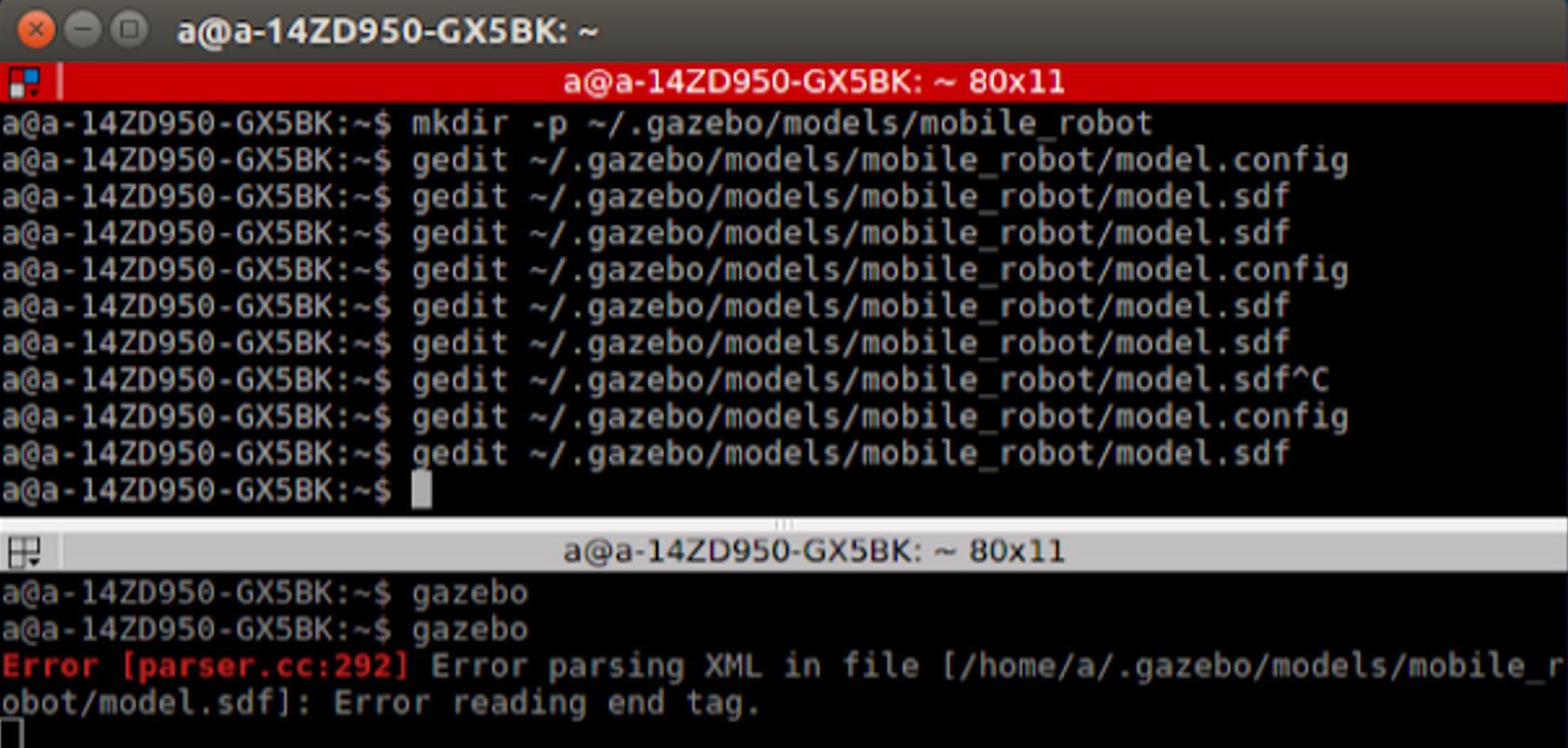
- 모델 폴더생성

- 모델 Config 파일 생성

- 다음의 내용을 model.config에 복사해 붙여 넣기

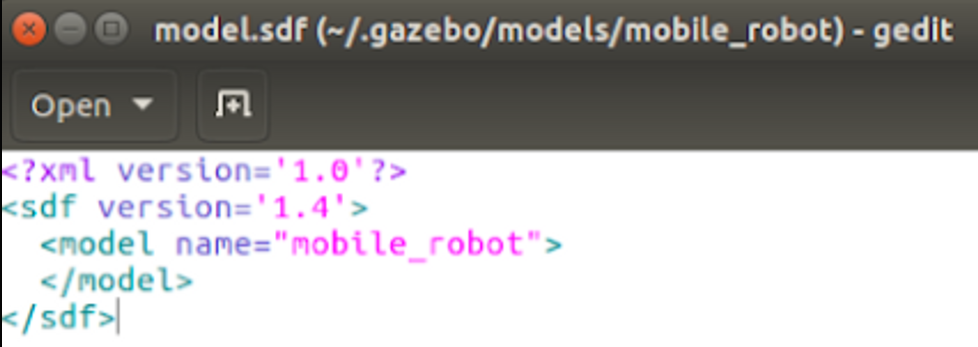
- model.sdf 파일 생성하기

- 다음의 내용을 복사해 붙여넣기
- open new terminal
gazebo
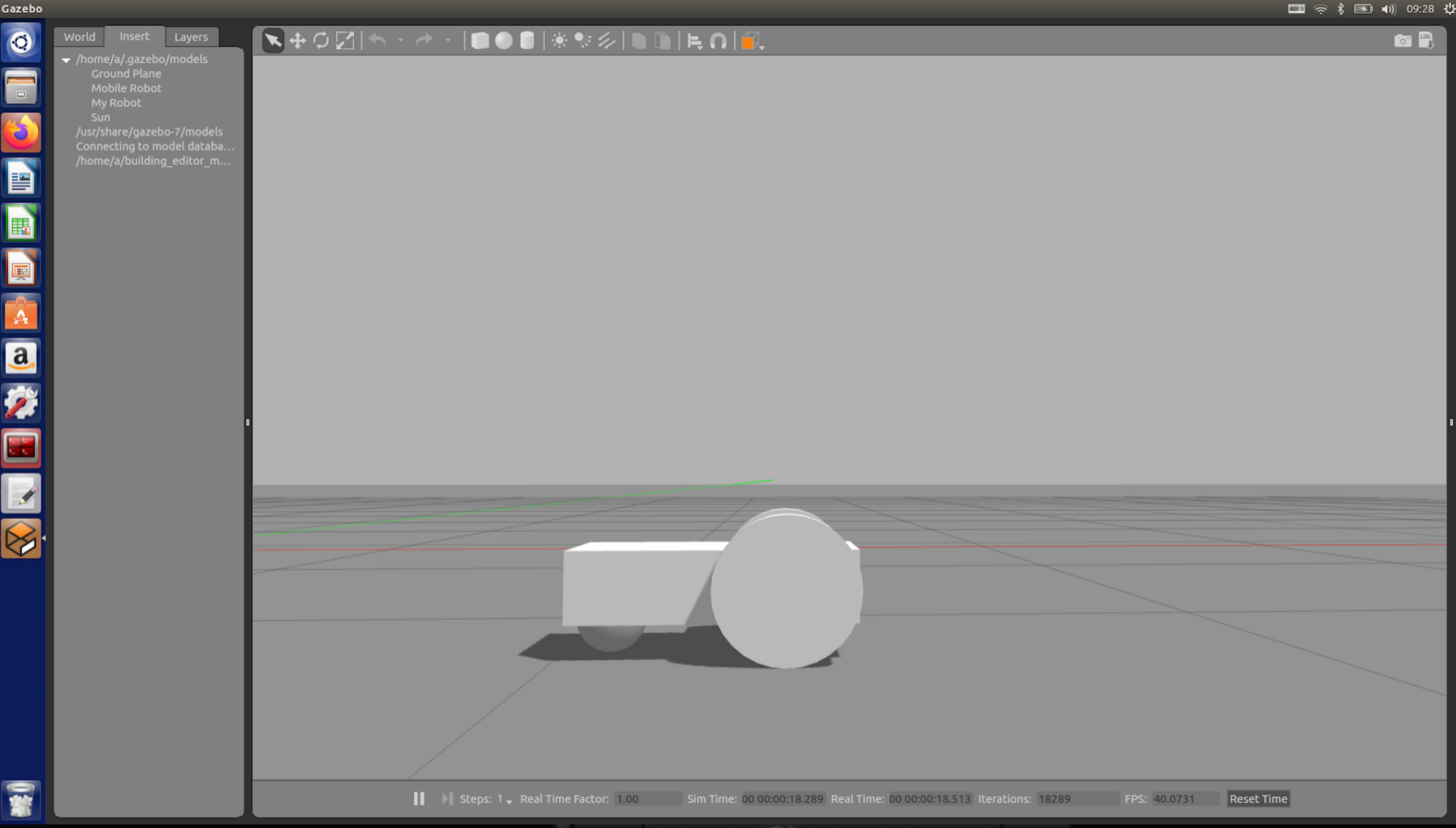
- Gazebo 실행 초기 화면
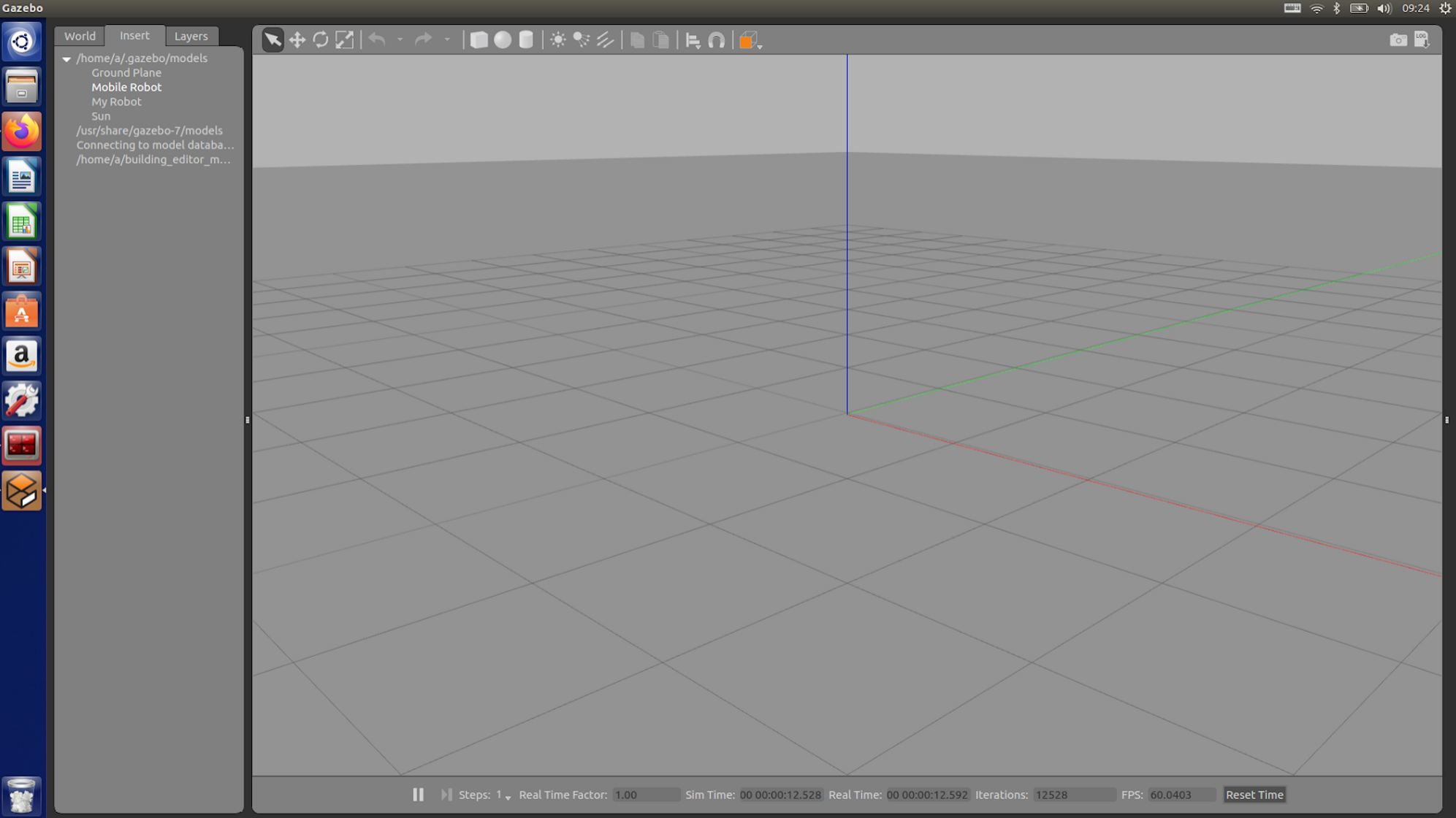
- 왼쪽 항목의 Insert에서, mobile robot을 클릭하여 놓는다.
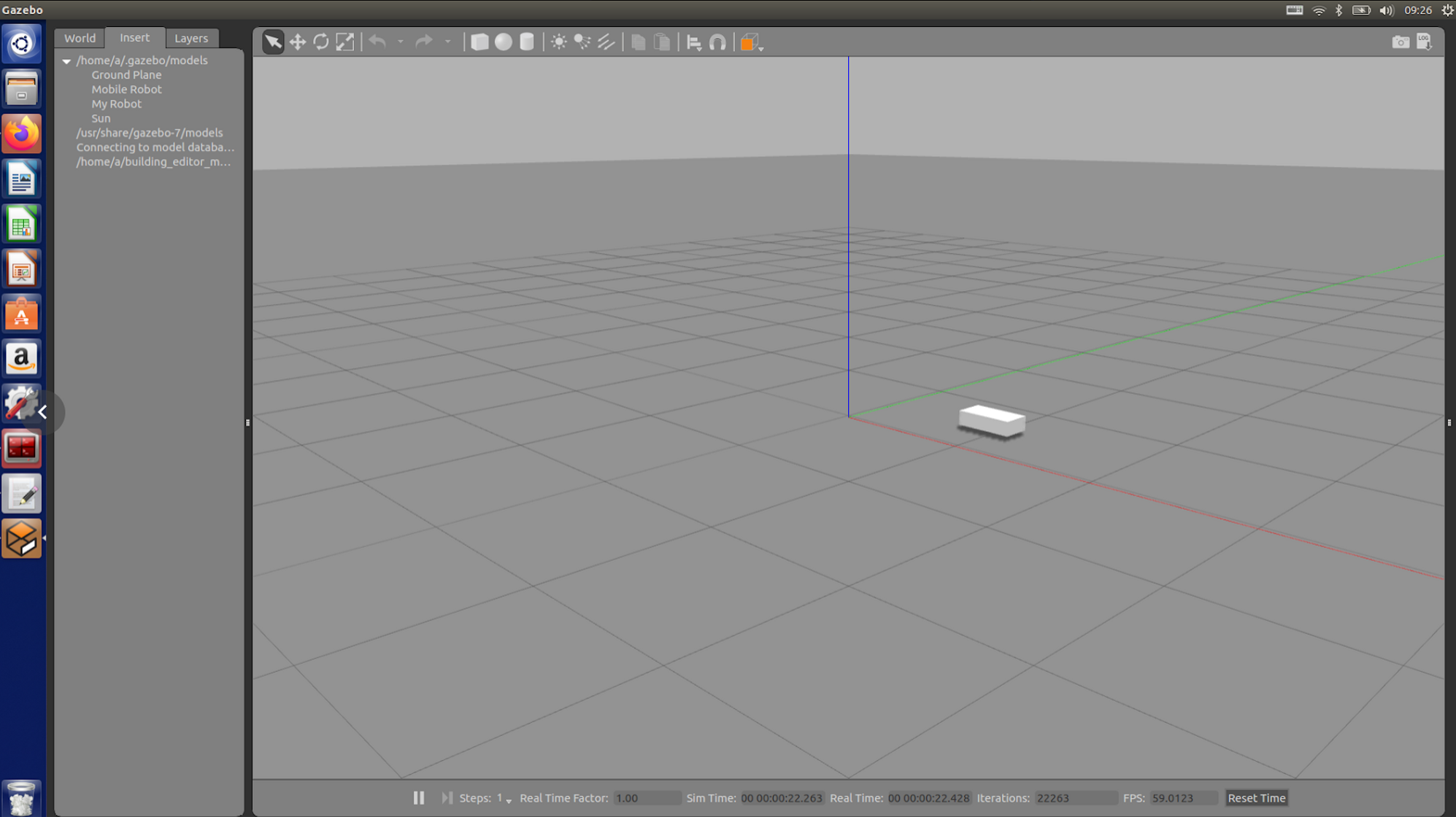
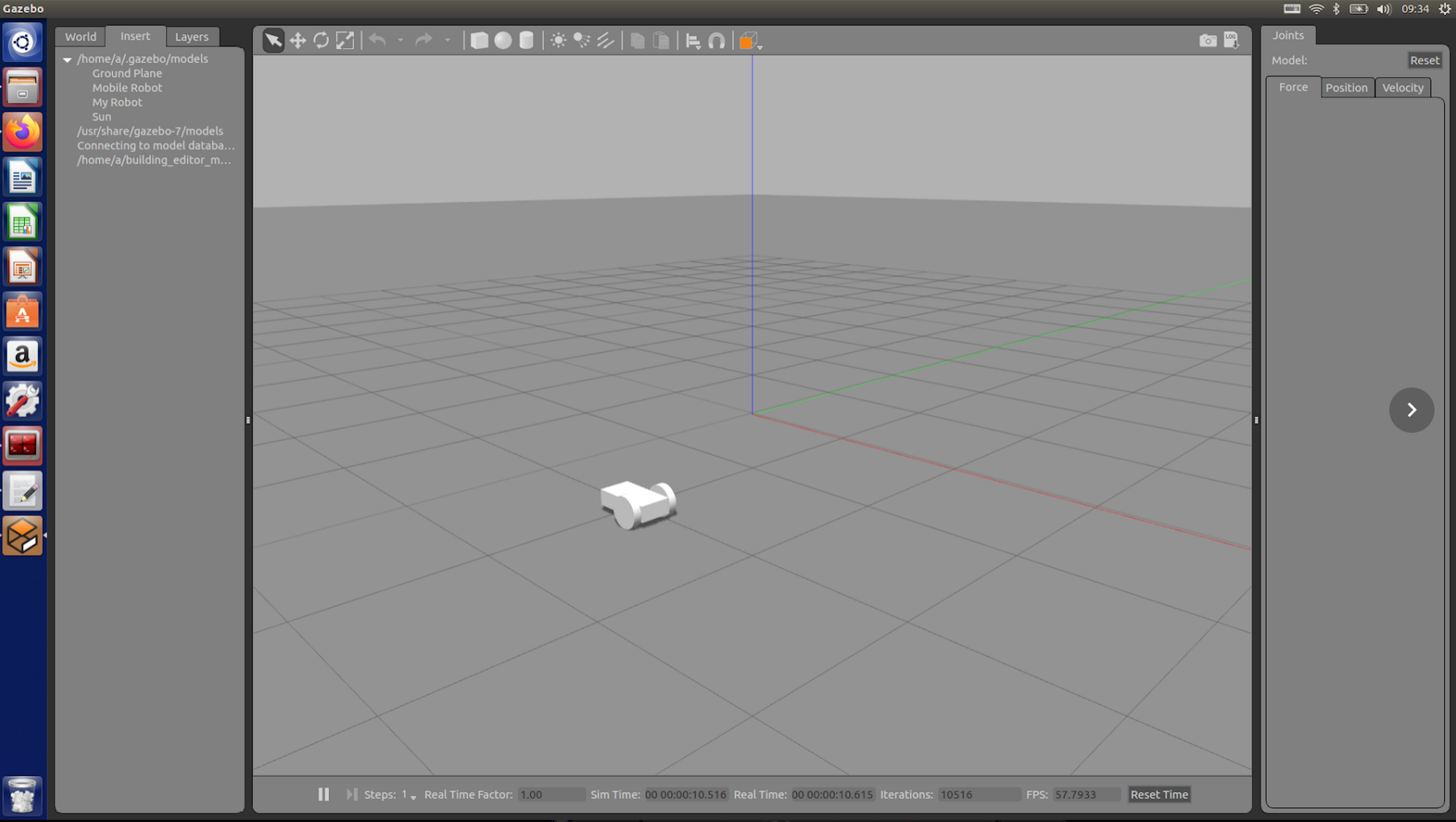
- 처음의 전 코드를 model.sdf에 복사 붙여넣기한다.
gedit ~/.gazebp/models/mobile_robot/model.sdf
- 수정된 코드를 저장 후, 로봇을 다시 클릭해 바탕에 놓는다.
728x90
반응형
'공학 > ROS' 카테고리의 다른 글
| ROS 기초부터 시작하는 터틀심(turtlesim) - 목차 (0) | 2023.03.10 |
|---|---|
| ROS - 터틀심을 이용한 ROS기초, Rqt tutorial(Turtlesim) (2) | 2023.03.08 |
| ROS - Gazebo tutorial (Official Tutorial), 튜토리얼 - Source Code(전체 코드) (0) | 2023.03.08 |
| ROS기반 Q필터가 적용된 비선형외란관측기(DOB)를 모바일 로봇 (0) | 2023.03.03 |
| ROS기반 sliding mode control 파이썬 코드 (0) | 2023.03.02 |
'공학/ROS' Related Articles
more
