
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 |
Tags
- 강화학습
- ROS2
- ubuntu
- 터틀심
- SLAM
- 젯슨
- Gazebo
- QT
- 오블완
- RTK
- GUI
- ROS
- Puck LITE
- turtlebot3
- 자율탐사
- WSL
- U-blox
- Jetson
- WSL2
- GPS
- Visual SLAM
- 아두이노
- C++
- turtlesim
- 자율주행
- 인공지능
- 티스토리챌린지
- 로봇
- Simulation
- ZED2
Archives
- Today
- Total
직관적인느낌
ROS - 터틀심을 이용한 ROS기초, Rqt tutorial(Turtlesim) 본문
728x90
반응형
roscore

- Open new terminal
rosrun turtlesim turtlesim_node

- Turtlesim 창, 활성화

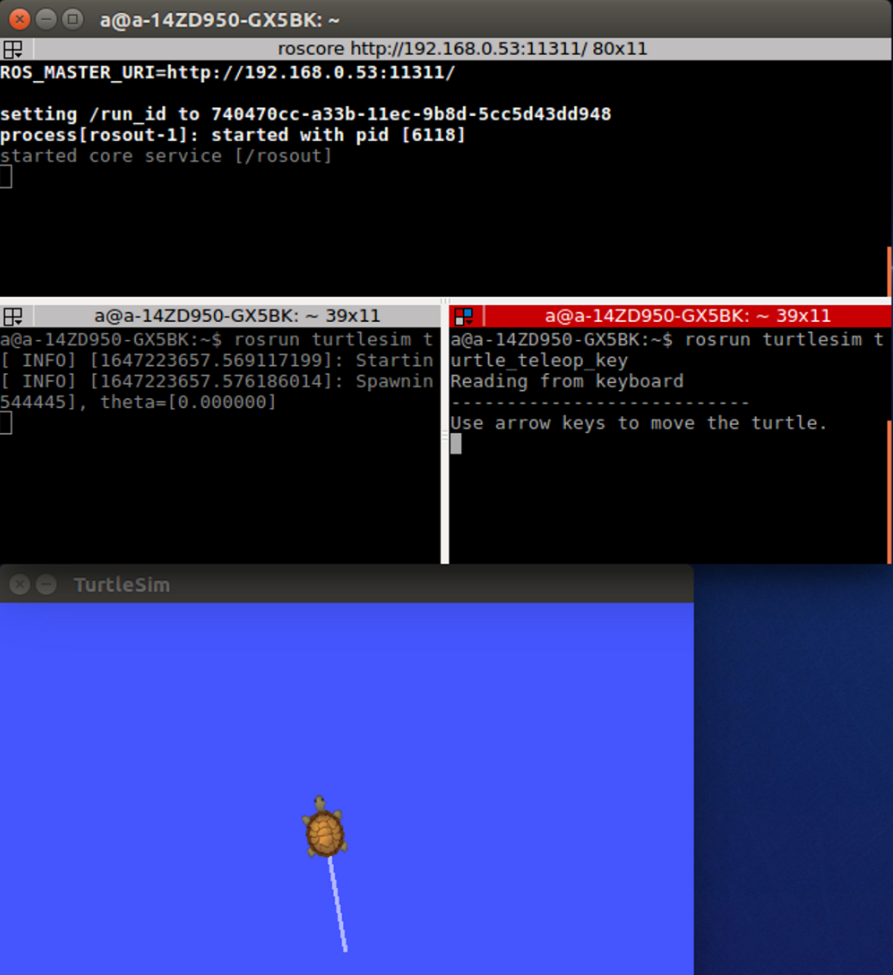
- Open new terminal
rosrun turtlesim turtle_teleop_key
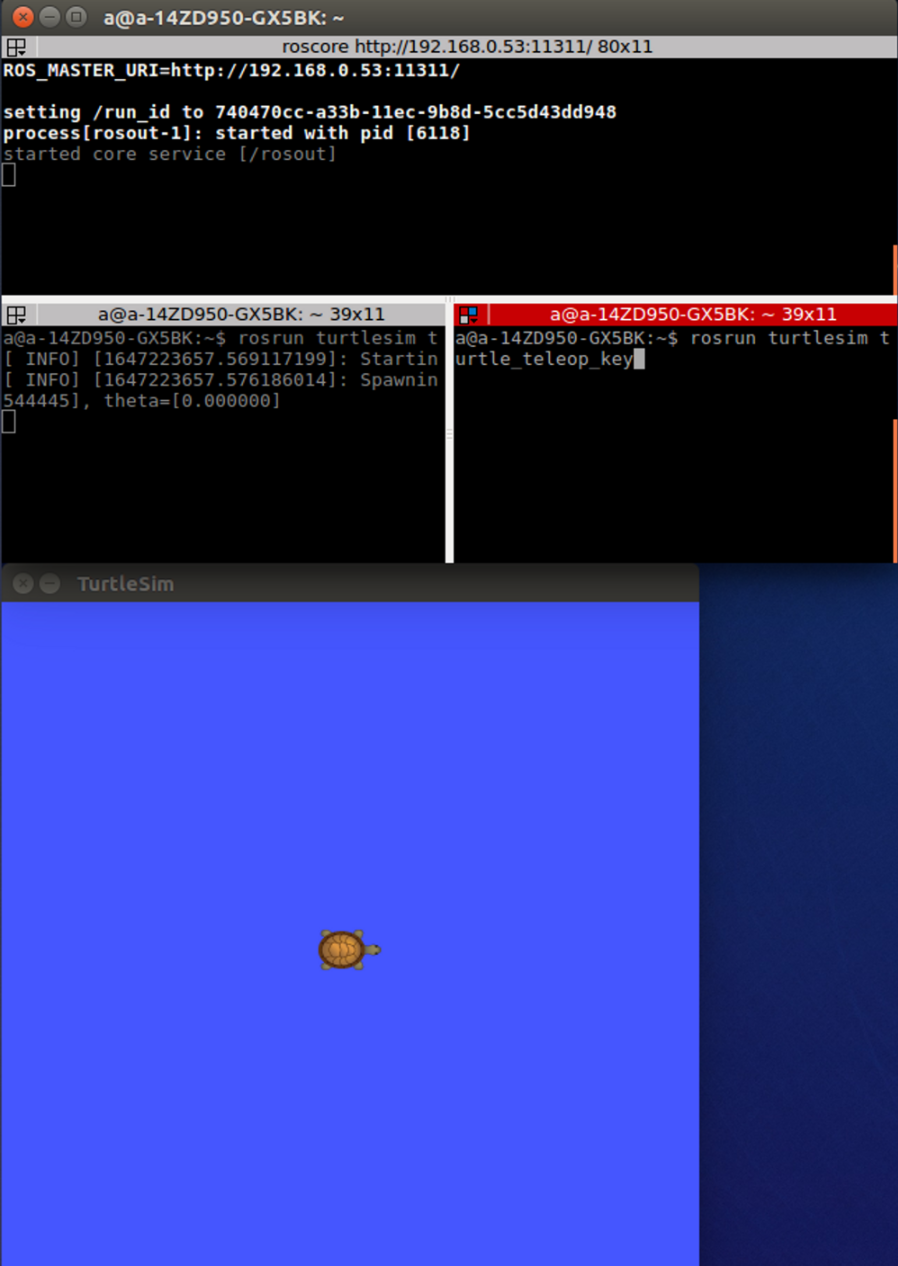
- 방향키 조작을 통한 거북이 움직임
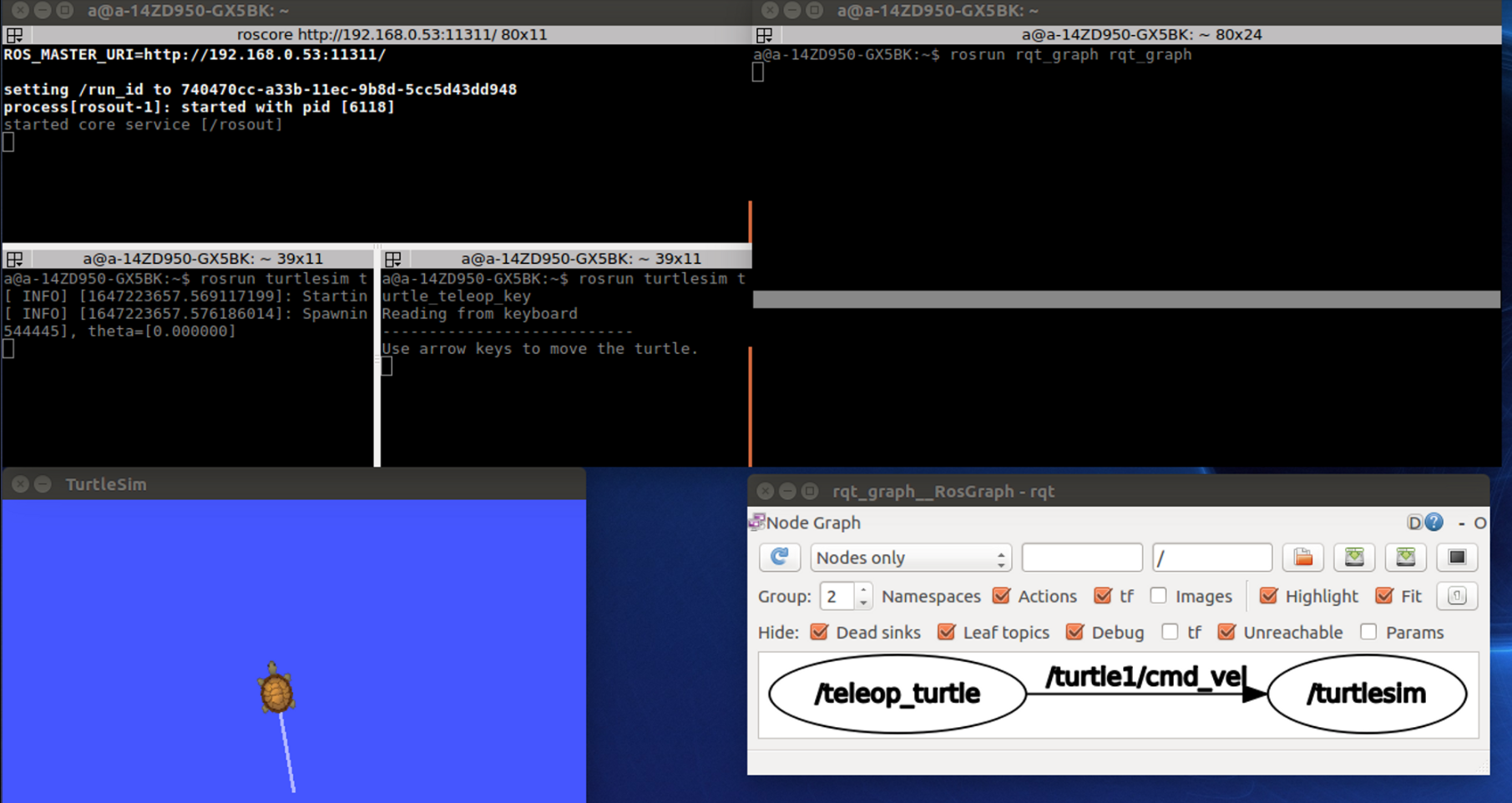
- Open new terminal
rosrun rqt_graph rqt_graph
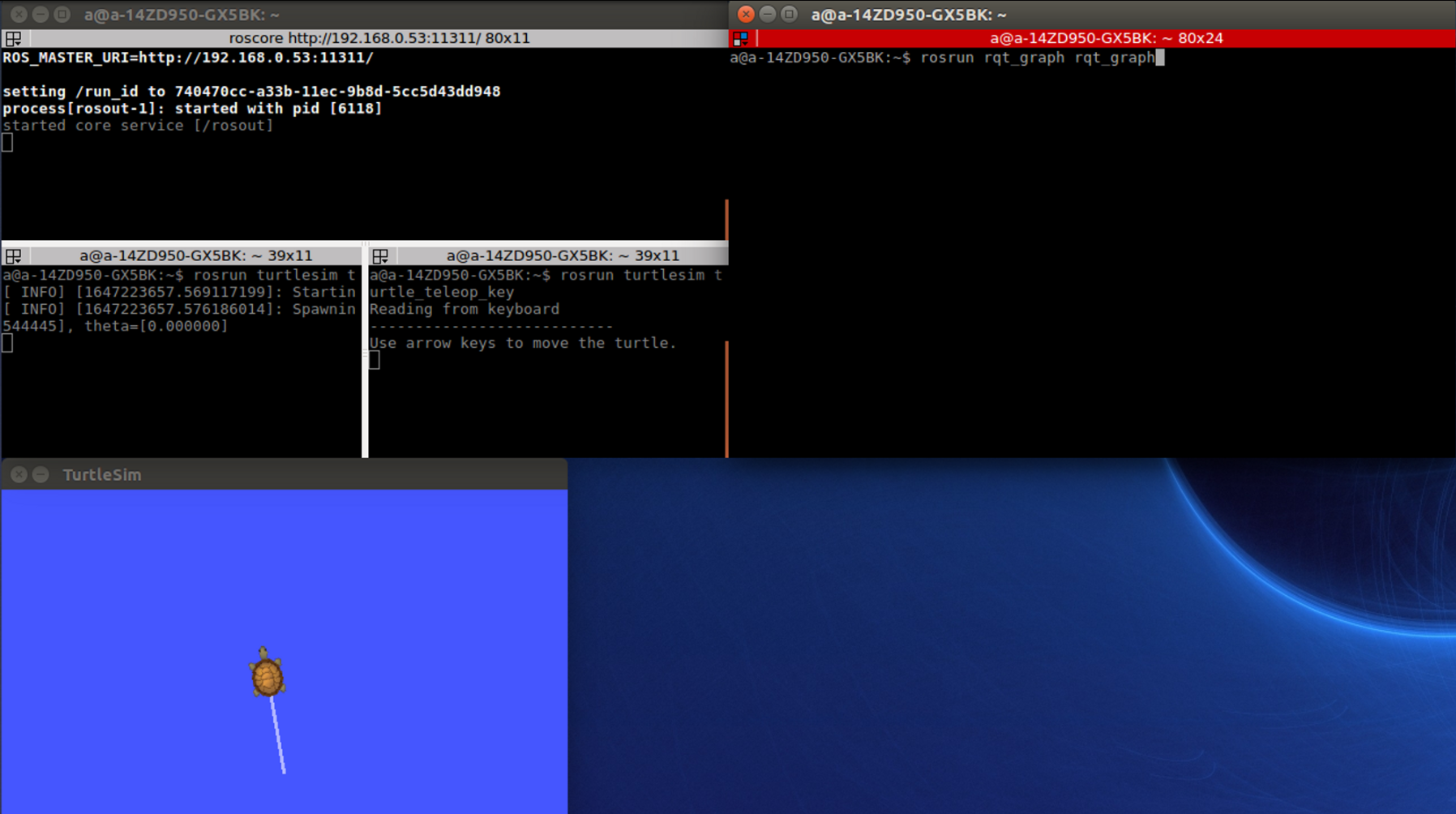
- rqt_graph를 통해, 현재 실행된 노드간의 통신 연결 상태 확인
- Open new terminal
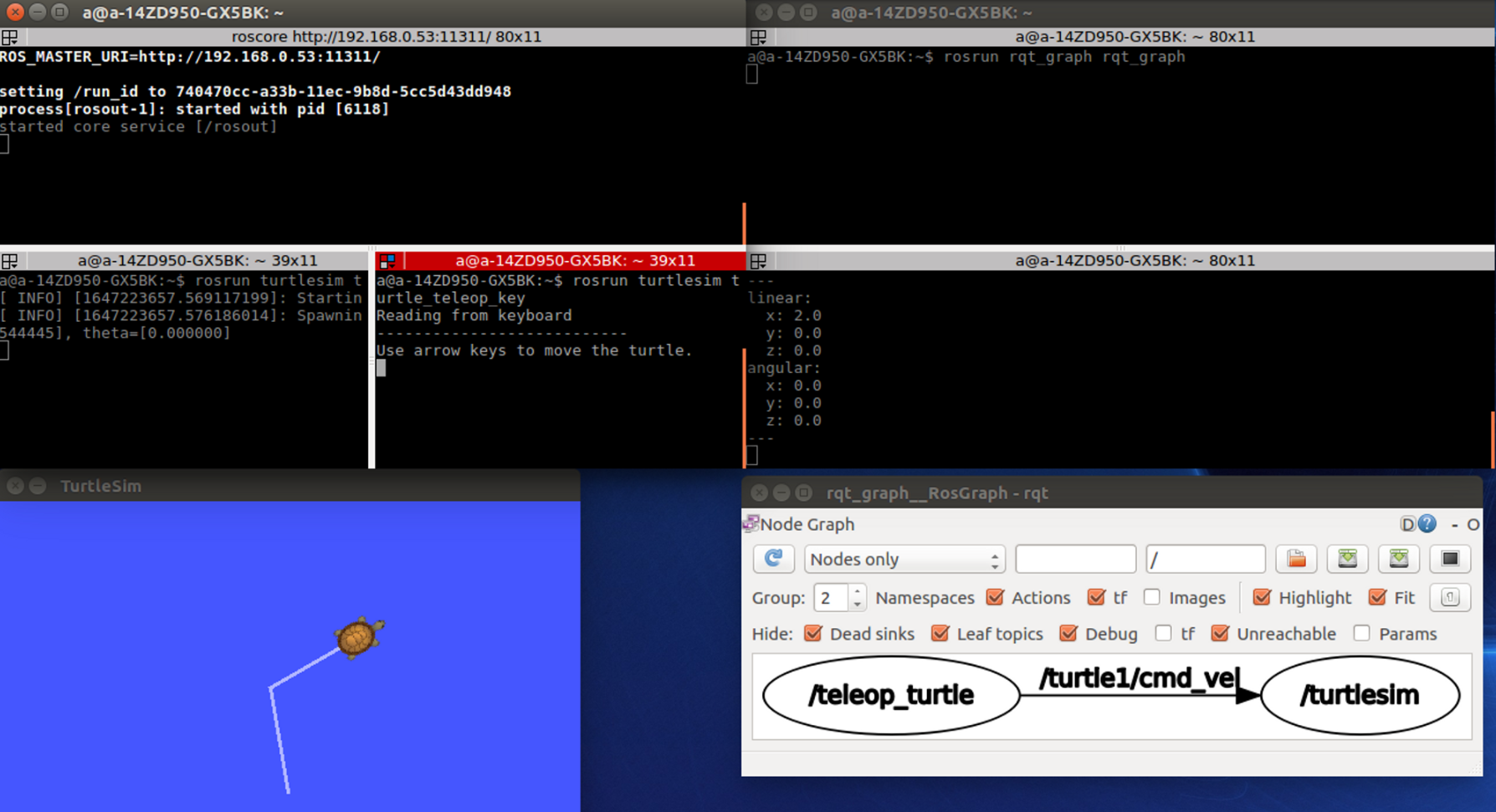
rostopic echo /turtle1/cmd_vel
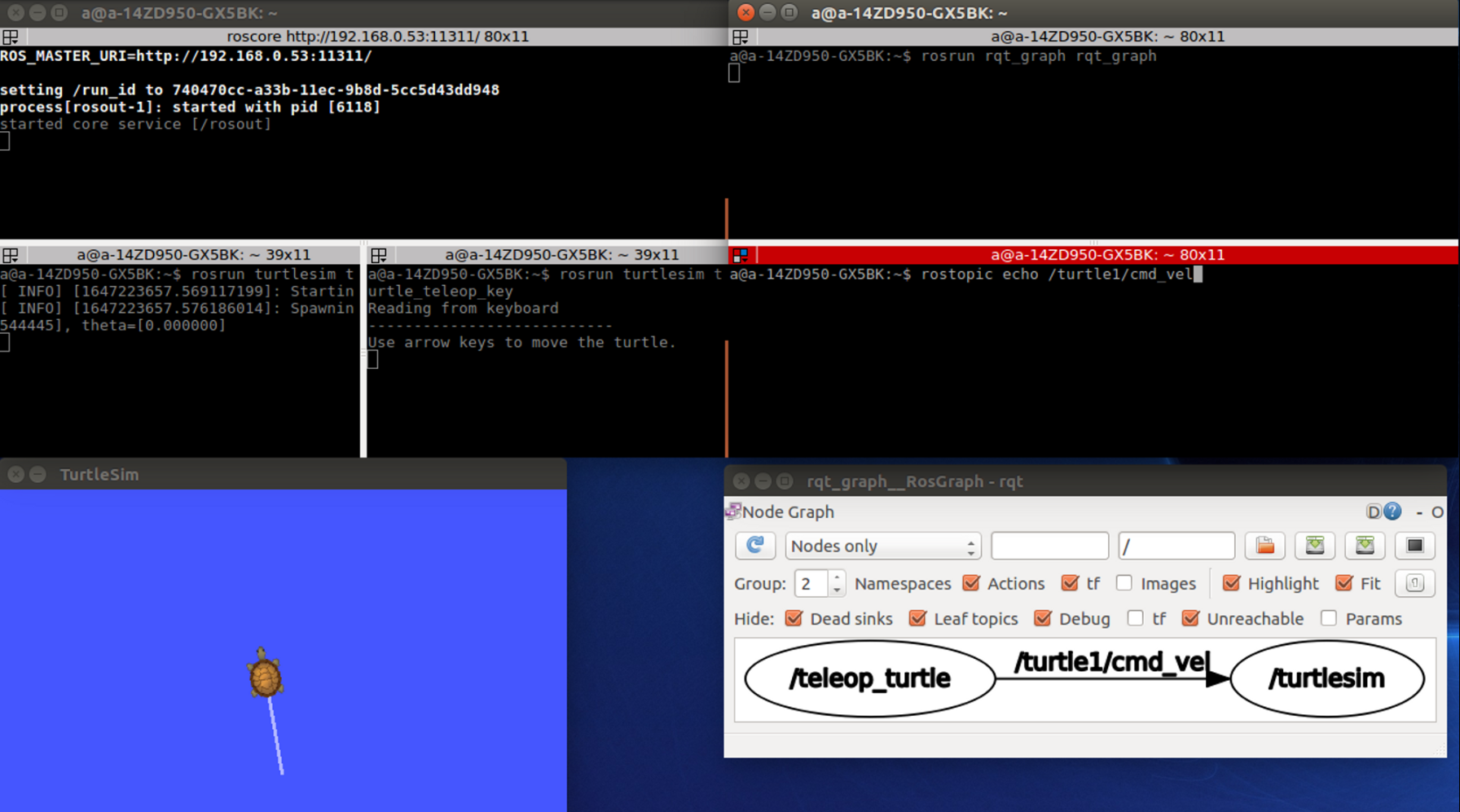
- 방향키로 거북이를 움직일때 마다, ‘cmd_vel’ 메세지의 전달 내용을 확인 가능
- Open new terminal
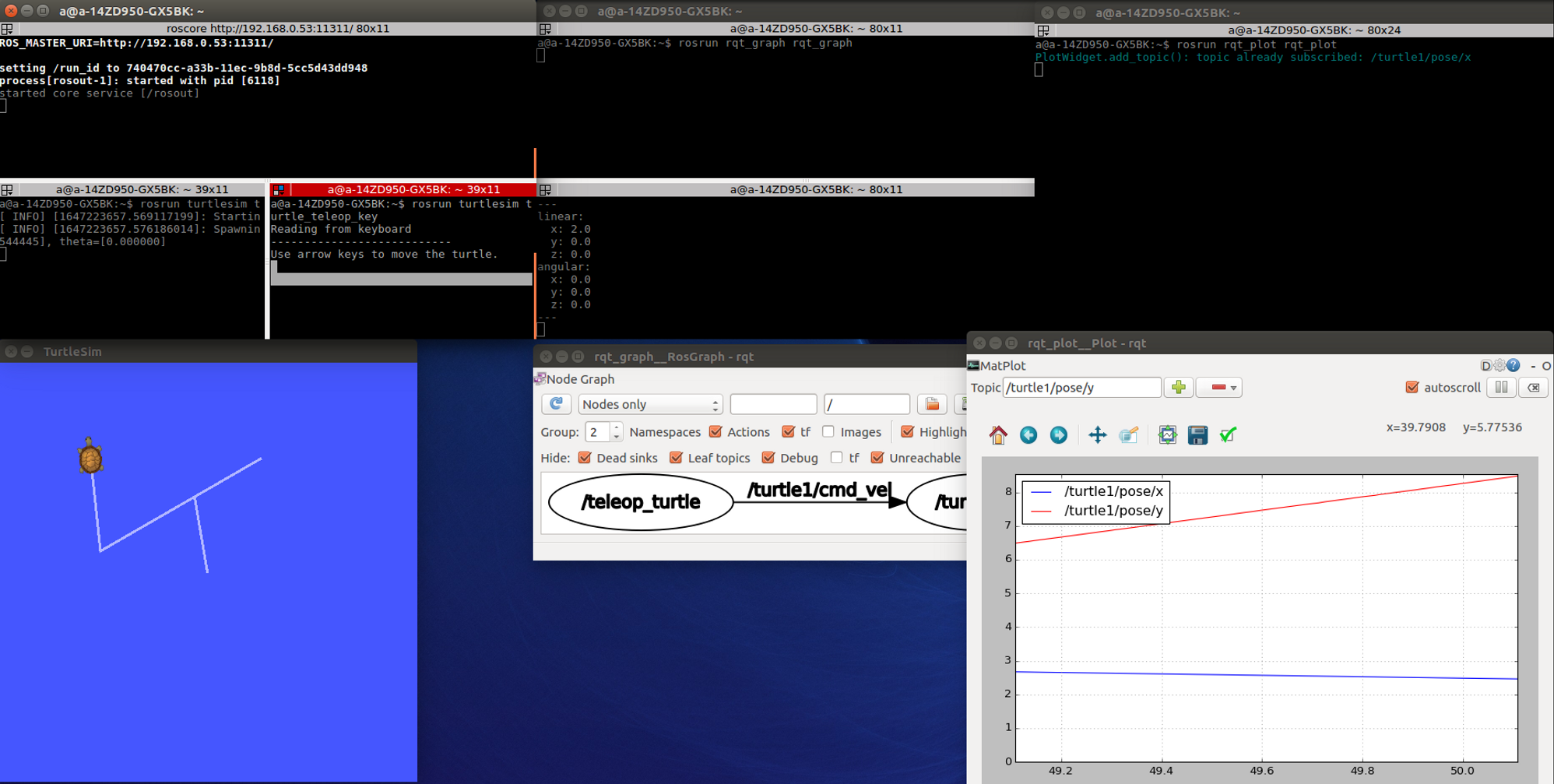
rosrun rqt_plot rqt_plot
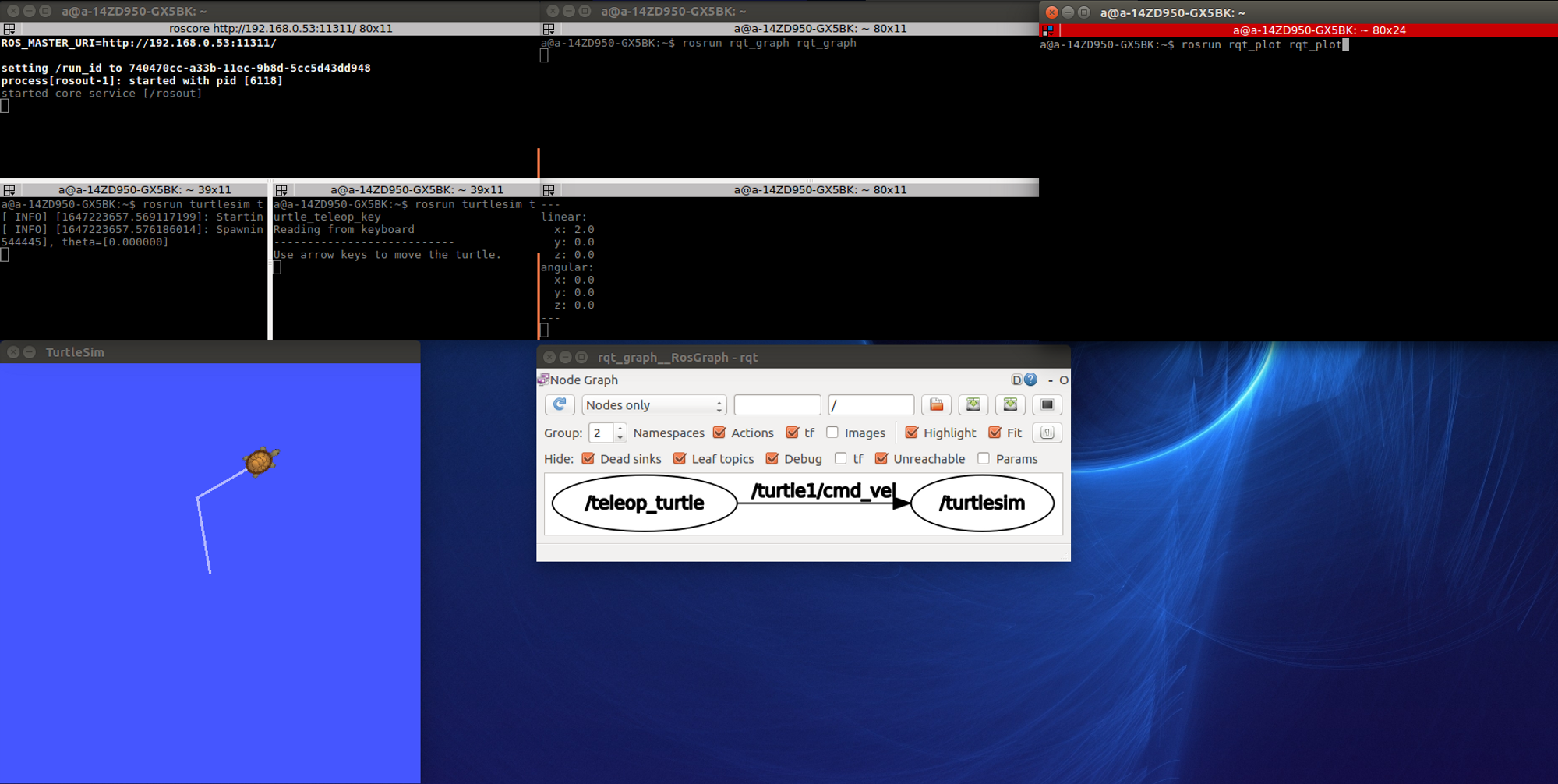
Topic 부분에 원하는 출력 리스트 작성
- /turtle1/pose/x
- /turtle1/pose/y
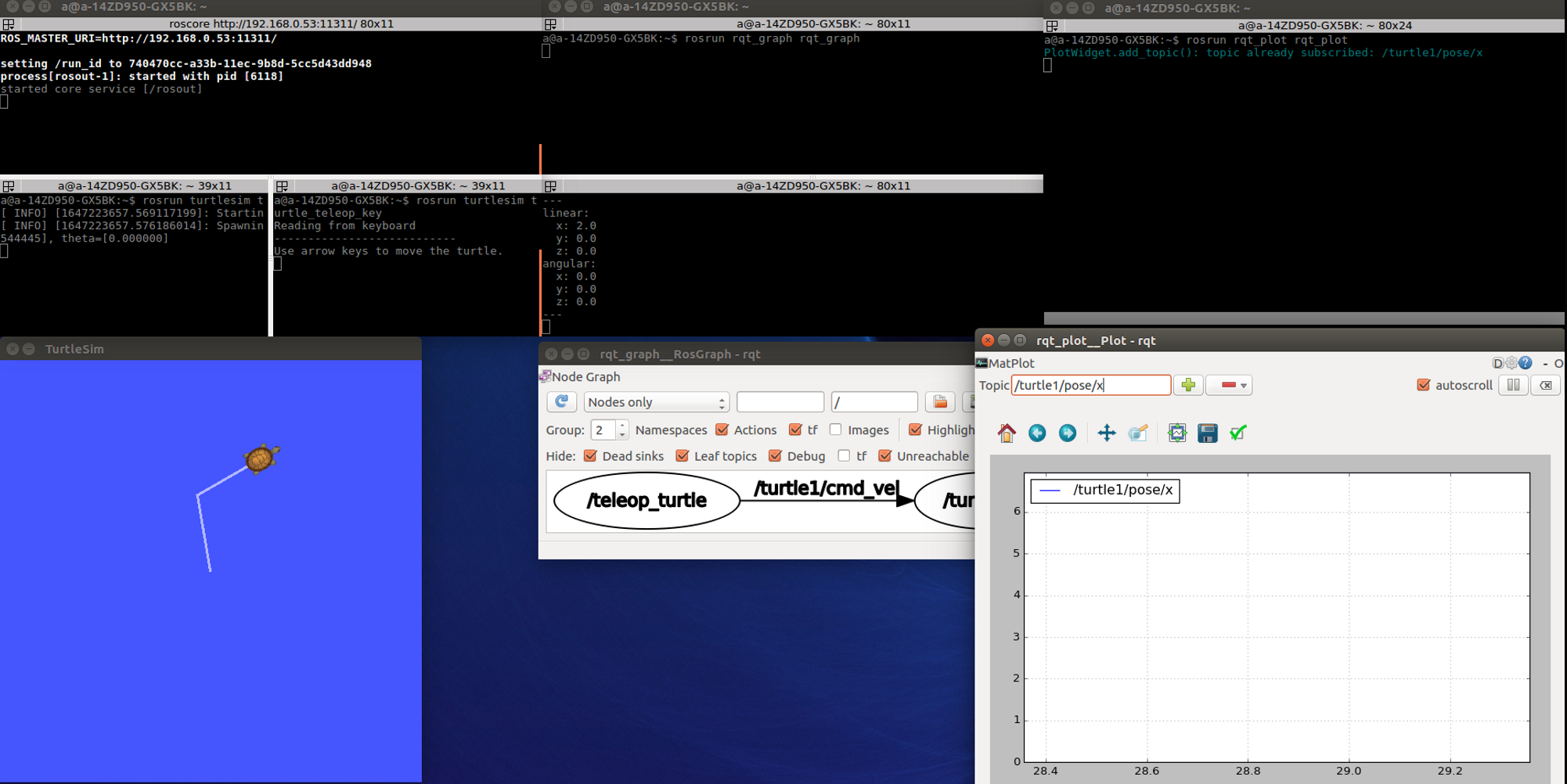
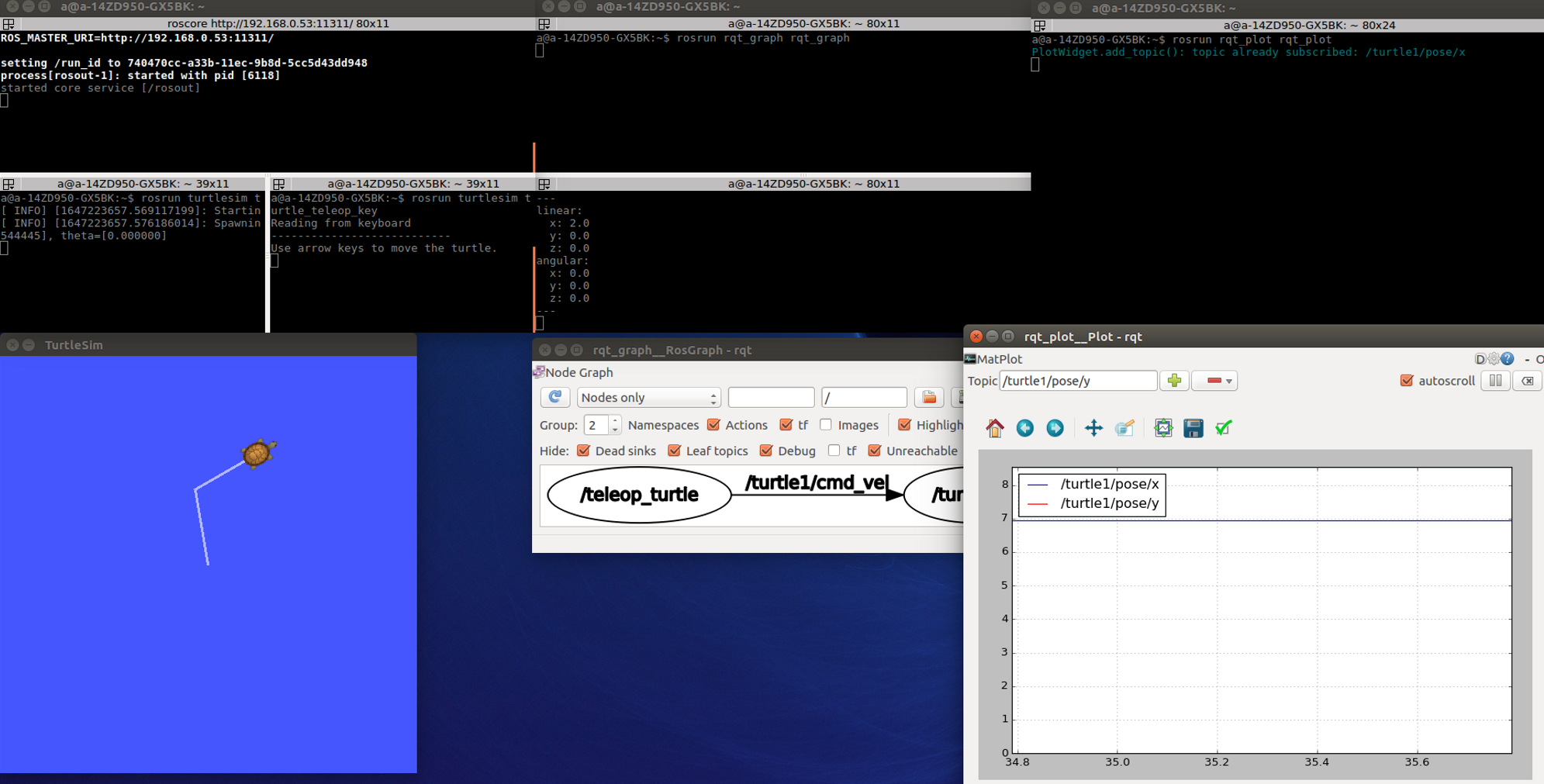
방향키를 통해 거북이를 움직일때, 거북이의 자세가 변함으로써 그래프에 변화가 있는것을 확인 할 수 있다.
Reference:
728x90
반응형
'공학 > ROS' 카테고리의 다른 글
| ROS 기초부터 시작하는 터틀심(turtlesim)2 - 설치 과정 (0) | 2023.03.10 |
|---|---|
| ROS 기초부터 시작하는 터틀심(turtlesim) - 목차 (0) | 2023.03.10 |
| ROS - Gazebo tutorial (Official Tutorial), 튜토리얼 (0) | 2023.03.08 |
| ROS - Gazebo tutorial (Official Tutorial), 튜토리얼 - Source Code(전체 코드) (0) | 2023.03.08 |
| ROS기반 Q필터가 적용된 비선형외란관측기(DOB)를 모바일 로봇 (0) | 2023.03.03 |
'공학/ROS' Related Articles
more
