
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
Tags
- 자율탐사
- C++
- WSL2
- 터틀심
- Puck LITE
- 인공지능
- Jetson
- WSL
- ZED2
- turtlebot3
- turtlesim
- Simulation
- ROS
- GUI
- RTK
- 자율주행
- 티스토리챌린지
- ubuntu
- QT
- 로봇
- 오블완
- Visual SLAM
- SLAM
- DevOps
- 강화학습
- ROS2
- Gazebo
- GPS
- 젯슨
- U-blox
Archives
- Today
- Total
직관적인느낌
ROS 카메라 기반 lane tracking - (4) Tracking Simulation 본문
728x90
반응형
source : turtlebot autorace
Tracking Simulation 환경(공통 - case1, case2)
terminal 1
roscoreterminal2
roslaunch turtlebot3_gazebo turtlebot3_autorace_edu.launch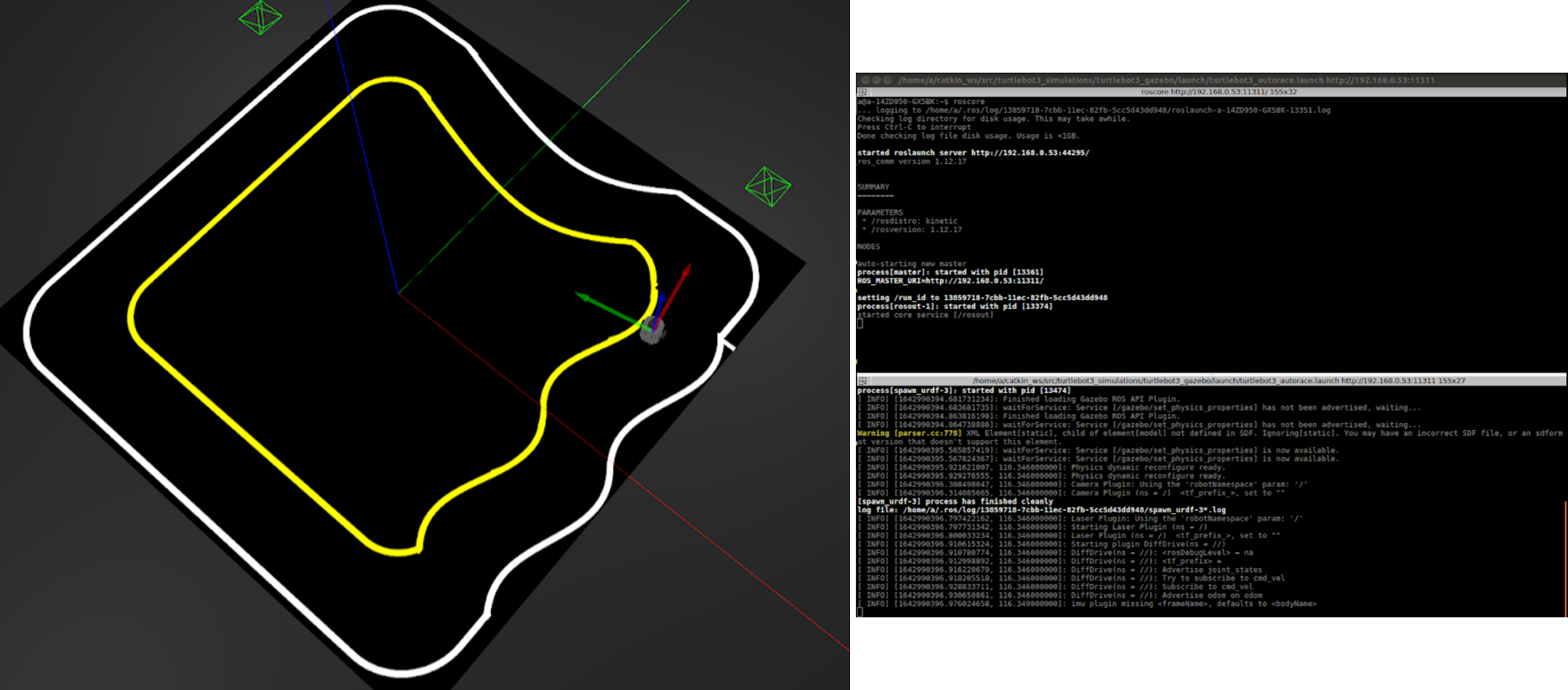
Tracking Simulation
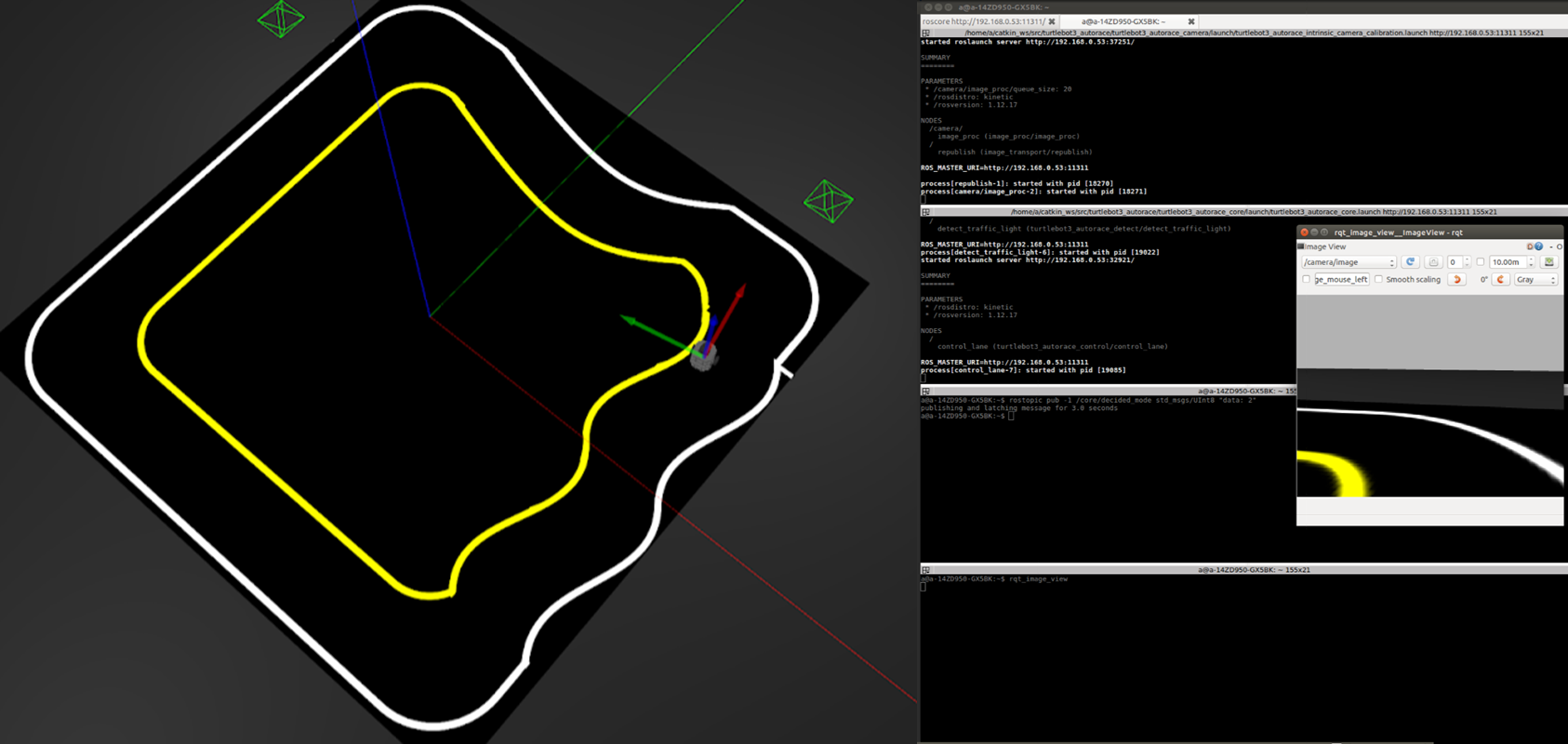
Case1) Lane 추종
Tracking Simulation 환경 실행
terminal 1
export AUTO_IN_CALIB=actionexport GAZEBO_MODE=falseroslaunch turtlebot3_autorace_camera turtlebot3_autorace_intrinsic_camera_calibration.launch
terminal 2
export AUTO_EX_CALIB=actionexport AUTO_DT_CALIB=action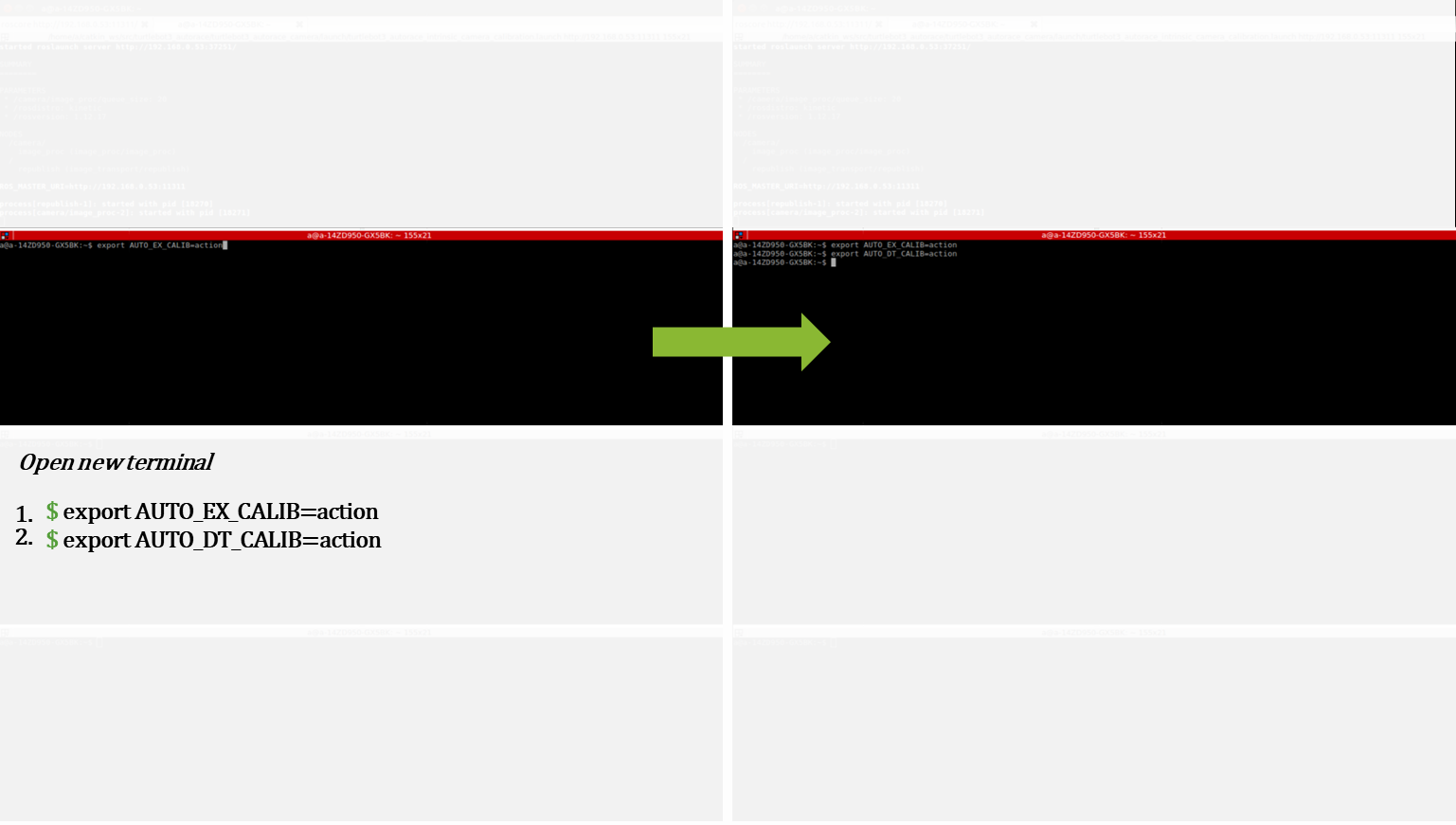
roslaunch turtlebot3_autorace_core turtlebot3_autorace_core.launch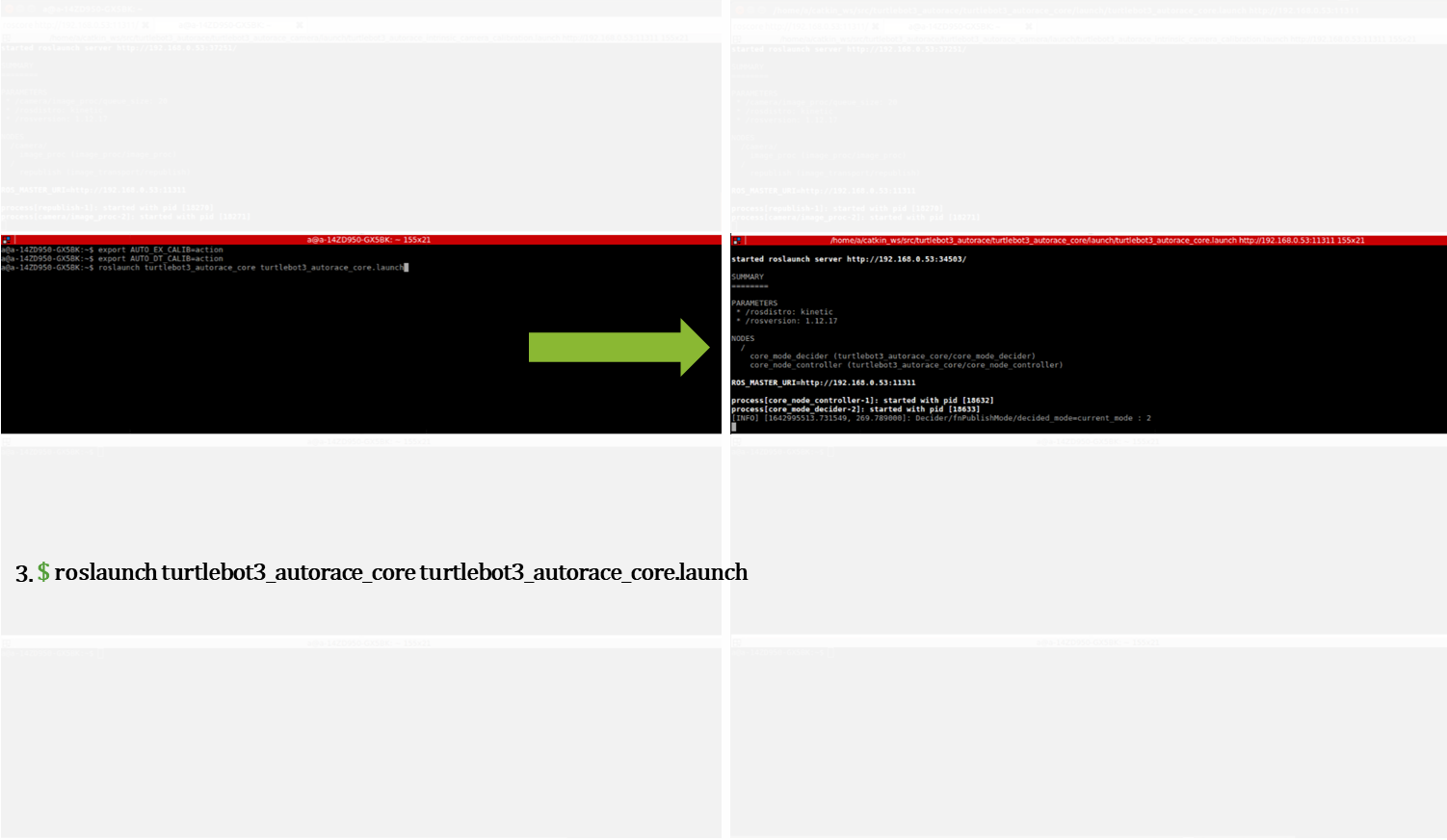
terminal 3
rostopic pub -1 /core/decided_mode std_msgs/UInt8 "data: 2"
terminal 4
rqt_image_view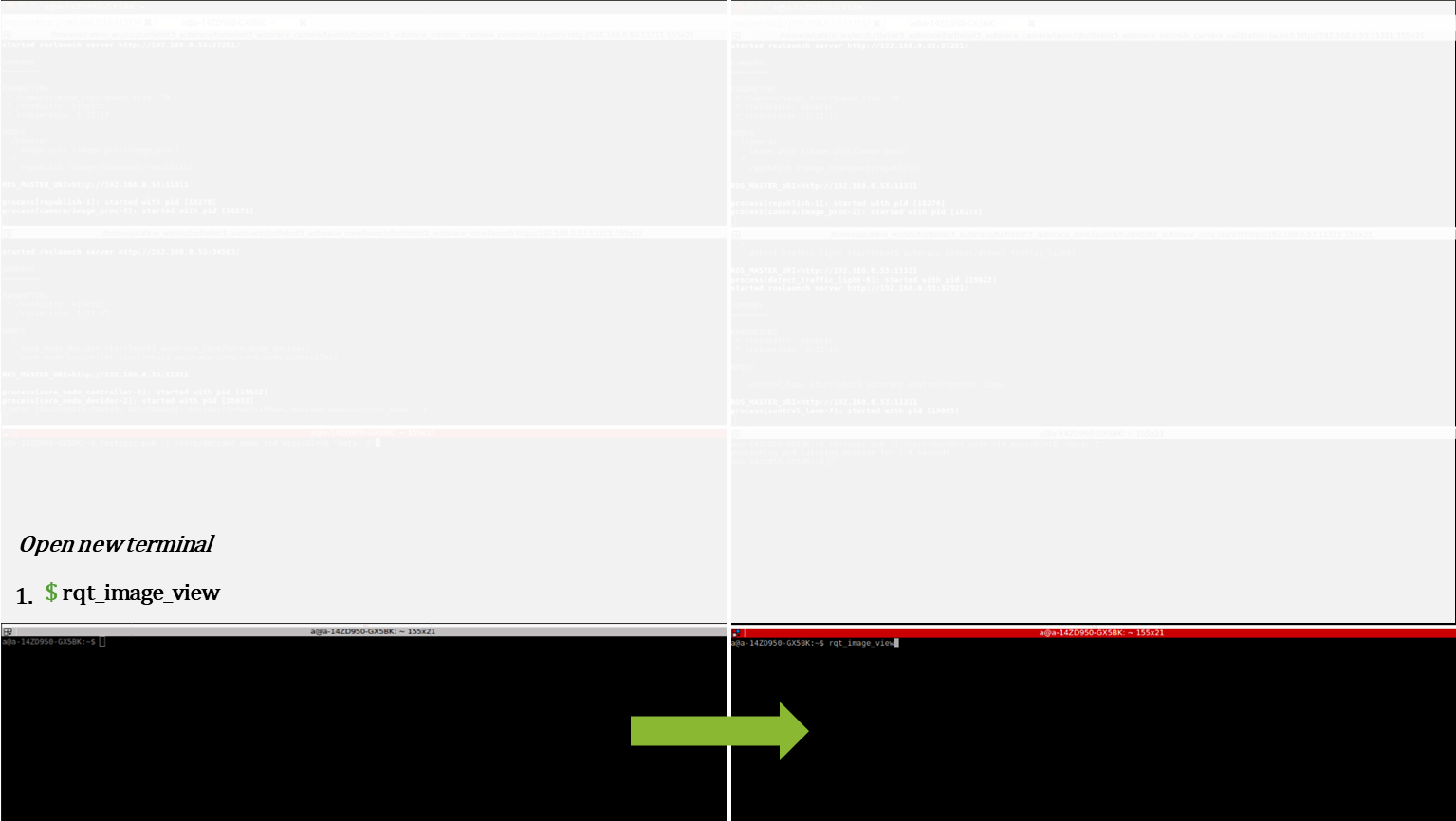
Tracking Simulation
Case2) 키보드 조작
Tracking Simulation 환경 실행
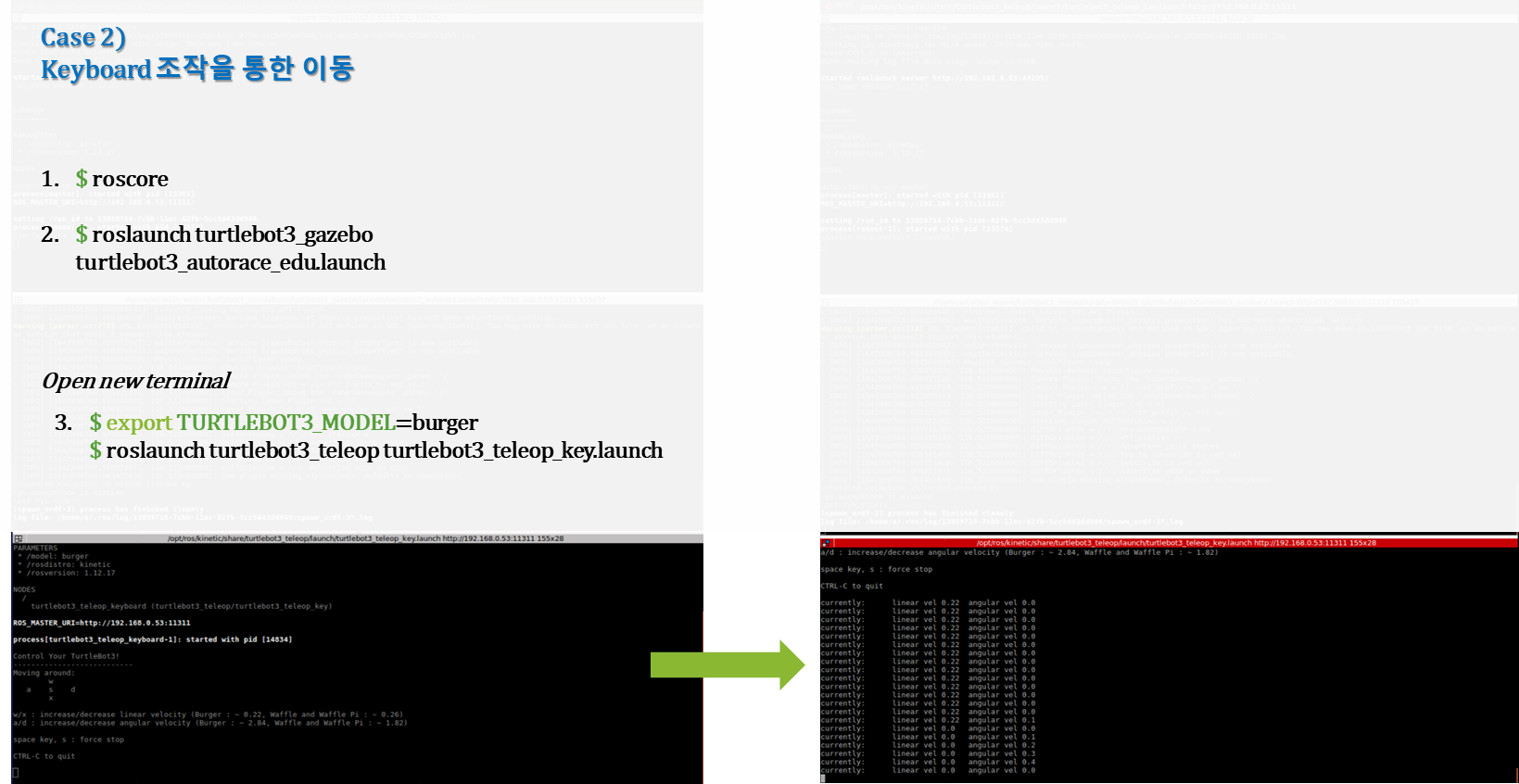
terminal 1
roscoreterminal 2
roslaunch turtlebot3_gazebo turtlebot3_autorace_edu.launchterminal 3
export TURTLEBOT3_MODEL=burgerroslaunch turtlebot3_teleop turtlebot3_teleop_key.launch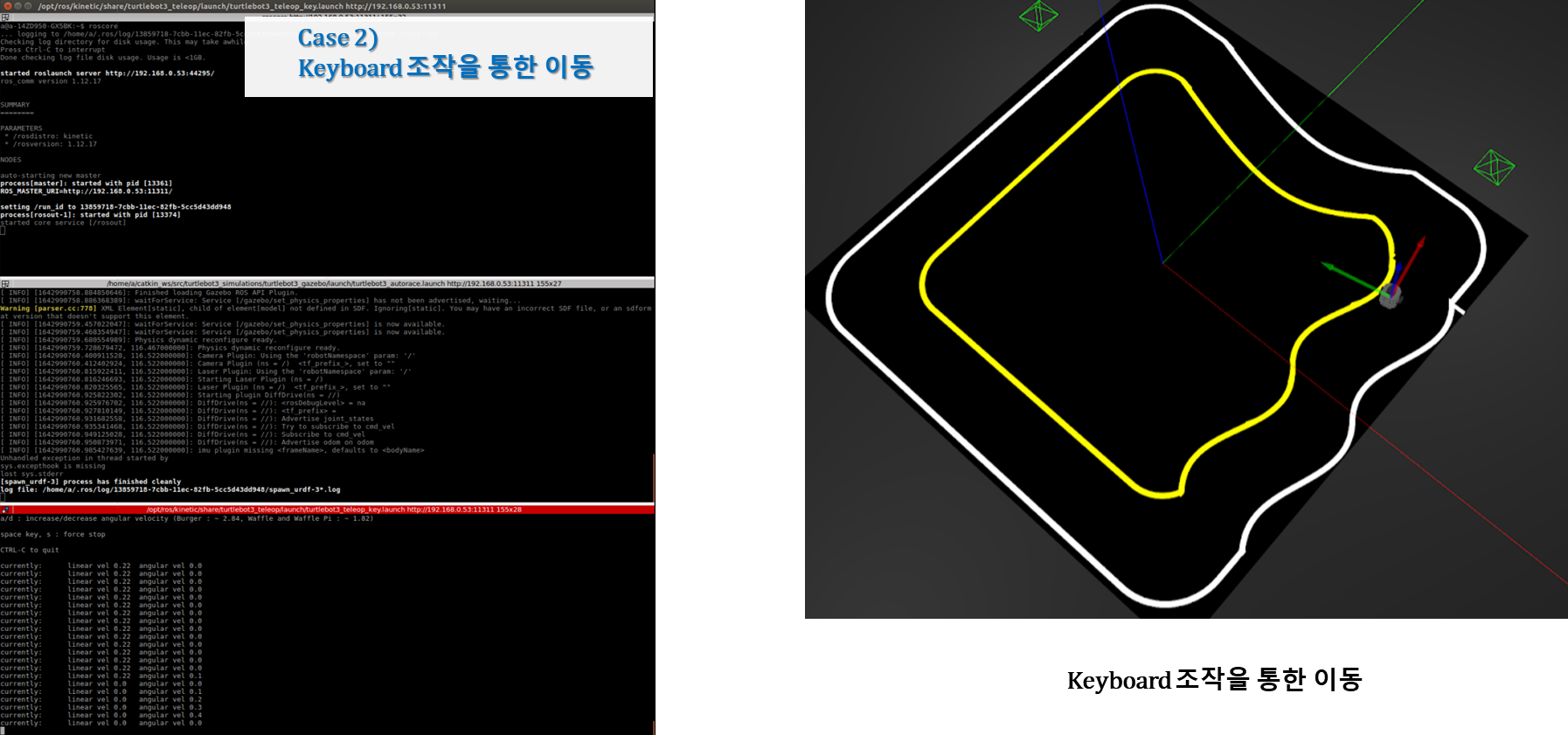
728x90
반응형
'공학 > 시스템 설치 및 설정' 카테고리의 다른 글
| [Jetson] Jetson stats 실행 (0) | 2023.04.03 |
|---|---|
| [Jetson] Jetson stats 설치 (0) | 2023.04.03 |
| ROS 카메라 기반 lane tracking - (3) Empty world simulation (0) | 2023.03.31 |
| ROS 카메라 기반 lane tracking - (2) Install Simulation Package (0) | 2023.03.30 |
| ROS 카메라 기반 lane tracking - (1) PC setup (0) | 2023.03.29 |
'공학/시스템 설치 및 설정' Related Articles
more

